
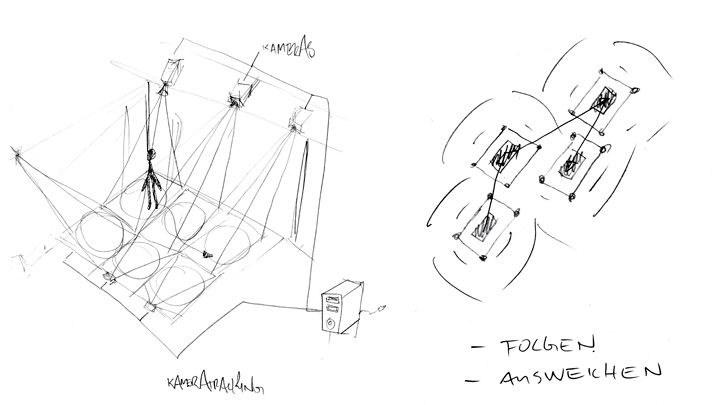
Plusieurs des caméras installées dans l’espace d’exposition indiquent les positions des objets et les transfèrent leurs coordonnées algorithmiques, grâce au logiciel de Tracking que nous avons développé à cet usage. Grâce à ces coordonnées, certains objets autonomes peuvent corriger leur position. Ils peuvent ainsi éviter les visiteurs et leur laisser le champ libre.
12 2009
Robotique : tracking caméra avec Grey Point et Reactivision – concept

