Réaliser Al Halqa Kinetics est un parcours. Nous découvrons et dessinons un nouveau territoire technologique, un matériel de conservation et visons à un accomplissement dramaturgique. Nous souhaitons documenter ce parcours en mots et en images comme suit:
-
 Le site Internet enfin en place- la réalisation fut compliqué. Il a à présent la forme pouvant accompagner et documenter le développement du projet Al Halqa Kinetics. Particulièrement dans ce domaine, nous documenterons régulièrement les progressions et régressions, mais jamais la stagnation.
Le site Internet enfin en place- la réalisation fut compliqué. Il a à présent la forme pouvant accompagner et documenter le développement du projet Al Halqa Kinetics. Particulièrement dans ce domaine, nous documenterons régulièrement les progressions et régressions, mais jamais la stagnation. - 09 2010
-
Logiciel : Le parcours modulaire – documentation

-
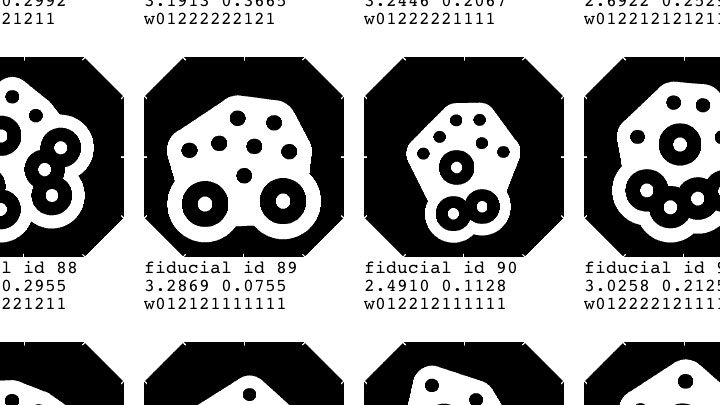 Ce sont parfois les petits problèmes qui mènent aux grandes solutions : notre problème étant que tous les Fiducialset existants sur le marché imposent des Marker importants – il est impératif dans notre cas d’avoir recours à une forme de construction réduite. Que faire ? Nous écrivons notre propre Set ! Gregor a travaillé assidûment et créé un Set novateur en matière de stabilité et de résolution.
Ce sont parfois les petits problèmes qui mènent aux grandes solutions : notre problème étant que tous les Fiducialset existants sur le marché imposent des Marker importants – il est impératif dans notre cas d’avoir recours à une forme de construction réduite. Que faire ? Nous écrivons notre propre Set ! Gregor a travaillé assidûment et créé un Set novateur en matière de stabilité et de résolution. - 09 2010
-
Le Set Al Halqa Kinetics Fiducal Marker – concept
-
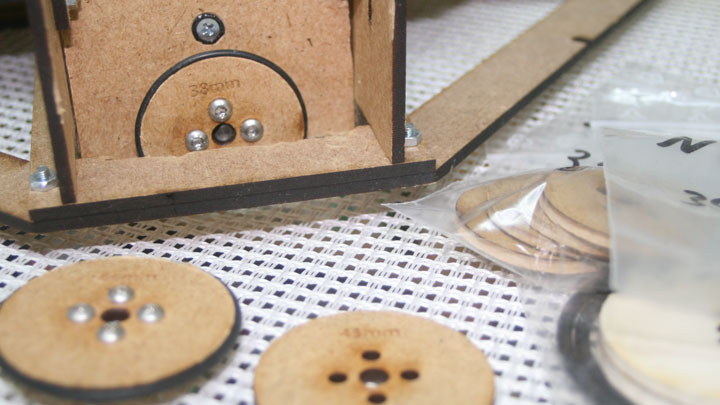 Nous sommes contraints de réduire notre besoin en énergie, car la capacité d’alimentation électrique de chaque robot est limitée. (Cela correspond à l’air du temps…) La taille de la roue joue un rôle énorme, à cause du début du tournage au démarrage- nous ne nous y attendions pas. La vitesse finale n’est pas déterminante ; ainsi : de petits pneus et installés plus bas!
Nous sommes contraints de réduire notre besoin en énergie, car la capacité d’alimentation électrique de chaque robot est limitée. (Cela correspond à l’air du temps…) La taille de la roue joue un rôle énorme, à cause du début du tournage au démarrage- nous ne nous y attendions pas. La vitesse finale n’est pas déterminante ; ainsi : de petits pneus et installés plus bas! - 08 2010
-
Robotik : diamètre de la roue - concept
-
 De longs essais avec éclairage infra rouge des objets donnent peu de résultat. Il est difficile d’éclairer simultanément et uniformément une surface de 150m2. Assez uniformément afin que la caméra correspondante repère le Marker en question et que l’ordinateur transcrive ses coordonnées. A peine possible : illuminer les Marker avec des LED à très faible puissance.
De longs essais avec éclairage infra rouge des objets donnent peu de résultat. Il est difficile d’éclairer simultanément et uniformément une surface de 150m2. Assez uniformément afin que la caméra correspondante repère le Marker en question et que l’ordinateur transcrive ses coordonnées. A peine possible : illuminer les Marker avec des LED à très faible puissance. - 08 2010
-
Robotik : Marker lumineux – concept
-
 L’entreprise norvégienne projectiondesign a la réputation de produire les projecteurs les plus innovants, robustes et professionnels -parfaits pour Al Halqa Kinetics. Nous nous réjouissons de l’expertise et des projecteurs de Projection Design et sommes heureux de la coopération.
L’entreprise norvégienne projectiondesign a la réputation de produire les projecteurs les plus innovants, robustes et professionnels -parfaits pour Al Halqa Kinetics. Nous nous réjouissons de l’expertise et des projecteurs de Projection Design et sommes heureux de la coopération. - 07 2010
-
Design de l’exposition : soutien de projectiondesign : news
-
 Abderahim Al Maqori- nommé « Al-Azaliah » d’après la légende éponyme- compte certainement parmi les conteurs les plus populaires de la Place. Dès son enfance, il commença à raconter. Cet art lui fut transmis par Al-Hussein, un des plus grands maîtres du Maroc, et sa grand-mère, une Bèrbère de Ourika...
Abderahim Al Maqori- nommé « Al-Azaliah » d’après la légende éponyme- compte certainement parmi les conteurs les plus populaires de la Place. Dès son enfance, il commença à raconter. Cet art lui fut transmis par Al-Hussein, un des plus grands maîtres du Maroc, et sa grand-mère, une Bèrbère de Ourika... - 06 2010
- Dramaturgie : les conteurs d’histoires – esquisses photographiques

-
 Presque tous les vendeurs de médecine traditionnelle viennent d’un petit village Tata, au sud du Maroc, non loin de la frontière algérienne. Les oasis du désert offrent les conditions de climat idéales pour les plantes médicinales, à partir desquelles les « Saharaoui » préparent leurs potions. Leur savoir médical est transmis dans la famille depuis des générations...
Presque tous les vendeurs de médecine traditionnelle viennent d’un petit village Tata, au sud du Maroc, non loin de la frontière algérienne. Les oasis du désert offrent les conditions de climat idéales pour les plantes médicinales, à partir desquelles les « Saharaoui » préparent leurs potions. Leur savoir médical est transmis dans la famille depuis des générations... - 06 2010
-
Dramaturgie : Les vendeurs d’herbe –croquis photographique
-
 Les Aissawa sont une confrérie, se rapportant au Saint Sufi Ben Aissa, dont le Marabout se situe à Meknès. Le serpent joue un rôle central pour eux. Leurs serpents viennent généralement du sud du Maroc. Afin de les capturer, ils se préparent des jours entiers et suivent leurs traces dans le sable. Ils sont souvent des journées entières sur la route, jusqu’à ce qu’ils trouvent leur proie.
Les Aissawa sont une confrérie, se rapportant au Saint Sufi Ben Aissa, dont le Marabout se situe à Meknès. Le serpent joue un rôle central pour eux. Leurs serpents viennent généralement du sud du Maroc. Afin de les capturer, ils se préparent des jours entiers et suivent leurs traces dans le sable. Ils sont souvent des journées entières sur la route, jusqu’à ce qu’ils trouvent leur proie. - 06 2010
-
Dramaturgie : transe et danse – esquisse photographique
-
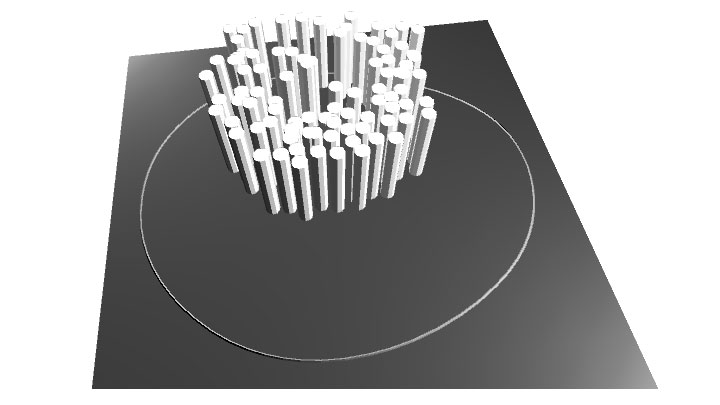 La première étape dans le domaine de pilotage algorithmique de l’objet est une simulation algorithmique de l’objet. Sans détecteur de collision et conscience commune mais les objets connaissent cependant déjà les limites et elles sont aussi en 3D !
La première étape dans le domaine de pilotage algorithmique de l’objet est une simulation algorithmique de l’objet. Sans détecteur de collision et conscience commune mais les objets connaissent cependant déjà les limites et elles sont aussi en 3D ! - 06 2010
-
Logiciel : densité et proximité dans l espace
-
 Nasiri Desri a le don de voir l’avenir de la personne en face de lu. Il partage volontiers ses connaissances en retour d’une obole. Tous les jours, à la tombée de la nuit, il arrive sur Djemma El Fna, accompagné de son faucon, pour rassembler sa Halqa.
Nasiri Desri a le don de voir l’avenir de la personne en face de lu. Il partage volontiers ses connaissances en retour d’une obole. Tous les jours, à la tombée de la nuit, il arrive sur Djemma El Fna, accompagné de son faucon, pour rassembler sa Halqa. - 05 2010
-
Dramaturgie : magicien, enchanteur et voyant – esquisse photographique
-
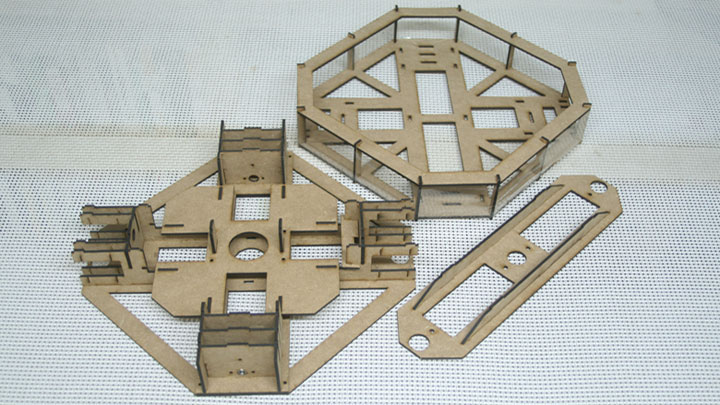 Le développement des châssis va encore nous prendre quelques temps. Raccords, suspensions et mécanisme de charge sont les composants du système permanent et facile à entretfeuenir qui devra être pensé et réalisé.
Le développement des châssis va encore nous prendre quelques temps. Raccords, suspensions et mécanisme de charge sont les composants du système permanent et facile à entretfeuenir qui devra être pensé et réalisé. - 05 2010
-
Robotique : révision des châssis –concept
-
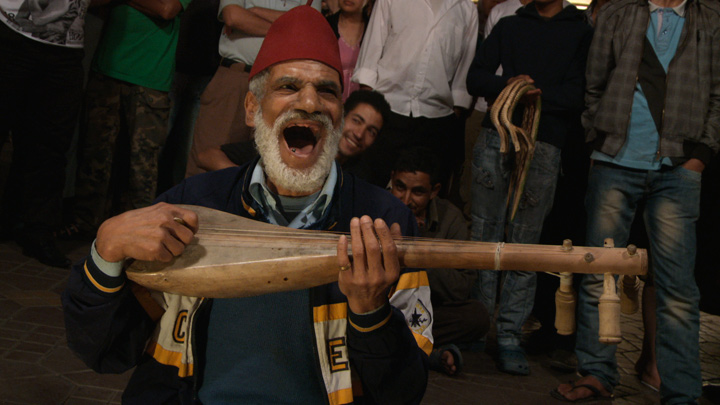 Timesh –le crocodile- Sur la Place, on l’appelle le « Bob Marley marocain ». Il taquine joyeusement son public en chansons. Une de ses spécialités est la disparition de cigarettes.
Timesh –le crocodile- Sur la Place, on l’appelle le « Bob Marley marocain ». Il taquine joyeusement son public en chansons. Une de ses spécialités est la disparition de cigarettes. - 05 2010
-
Dramaturgie : comédie – esquisse photographique
-
 Les Ulad Hamad ua Mouss, acrobates de Djemaa El Fna, sont pour la plupart orphelins et voyagent et s’exercent à l’acrobatie à travers le Maroc accompagné du chef du groupe. Afin de recevoir le Baraka, la bénédiction de leur art, ils rendent la visite obligatoire sur la tombe de leur ancêtre Sidi Hamad ua Mouss. Sa Baraka les protége des accidents et des blessures...
Les Ulad Hamad ua Mouss, acrobates de Djemaa El Fna, sont pour la plupart orphelins et voyagent et s’exercent à l’acrobatie à travers le Maroc accompagné du chef du groupe. Afin de recevoir le Baraka, la bénédiction de leur art, ils rendent la visite obligatoire sur la tombe de leur ancêtre Sidi Hamad ua Mouss. Sa Baraka les protége des accidents et des blessures... - 05 2010
-
Dramaturgie : feu et acrobatie—esquisse photographique
-
 Le premier prototype est en place : les moteurs choisis avec soins sont très performants, les suspensions sont étonnamment solides. Seul le châssis du robot roulant a besoin d’une révision. Les boîtes de vitesses françaises sont en fait produites au Maroc… incroyable!
Le premier prototype est en place : les moteurs choisis avec soins sont très performants, les suspensions sont étonnamment solides. Seul le châssis du robot roulant a besoin d’une révision. Les boîtes de vitesses françaises sont en fait produites au Maroc… incroyable! - 04 2010
-
Robotique : le premier prototype – concept
-
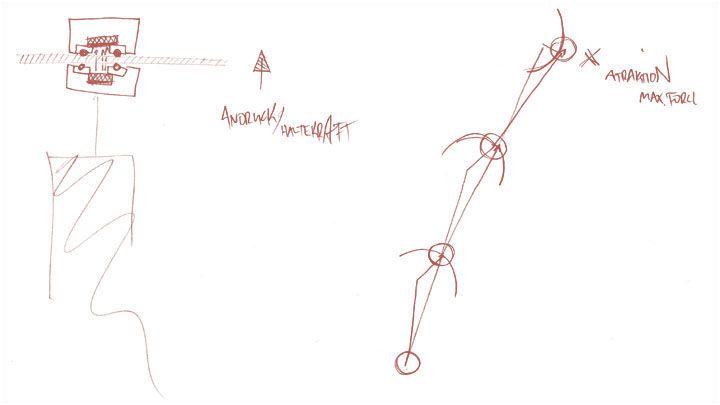
 Les gazes, enveloppes vides comme métaphore de la perte, sont des objets mélancoliques. À quoi ressemble le mouvement de ces objets? Où se trouve la transition entre Être et Hystérie dans ce souffle ou ce remorquage? Là aussi, les simulations vont nous aider.
Les gazes, enveloppes vides comme métaphore de la perte, sont des objets mélancoliques. À quoi ressemble le mouvement de ces objets? Où se trouve la transition entre Être et Hystérie dans ce souffle ou ce remorquage? Là aussi, les simulations vont nous aider. - 04 2010
-
Design de l’exposition : le souffle de la gaze—simulation
-
 Comment réaliser une surface flottante de 120 m2 ? On atteint vite les limites avec des plaques d’assemblage. Le manque de précision des raccords, le poids considérable et l’impossibilité de transport nous ont vite fait renoncé à cette option. Puis arriva la solution : la membrane PTFE !
Comment réaliser une surface flottante de 120 m2 ? On atteint vite les limites avec des plaques d’assemblage. Le manque de précision des raccords, le poids considérable et l’impossibilité de transport nous ont vite fait renoncé à cette option. Puis arriva la solution : la membrane PTFE ! - 03 2010
-
Design de l’exposition : structure membrane – concept
-
 Comment la chorégraphie va-t-elle dessiner l’espace ? Combien d’objets créent l’espace, combien le saturent ? À quelle vitesse doivent-ils se déplacer ? Ces questions trouvent difficilement une réponse avec un croquis statique, d’où les simulations qui suivront.
Comment la chorégraphie va-t-elle dessiner l’espace ? Combien d’objets créent l’espace, combien le saturent ? À quelle vitesse doivent-ils se déplacer ? Ces questions trouvent difficilement une réponse avec un croquis statique, d’où les simulations qui suivront. - 03 2010
-
Robotique : étude comportementale – concept
-
 Chacune des centaines de surfaces de projection est attachée à un dispositif de serrage particulier avec une guimbarde qui se déplace librement et individuellement- selon une chorégraphie- au niveau intermédiaire. Comment ? C’est un secret précieusement gardé et certainement une part de la magie de l’installation.
Chacune des centaines de surfaces de projection est attachée à un dispositif de serrage particulier avec une guimbarde qui se déplace librement et individuellement- selon une chorégraphie- au niveau intermédiaire. Comment ? C’est un secret précieusement gardé et certainement une part de la magie de l’installation. - 01 2010
-
Design de l’exposition : surface de projection autonome et dispositif de serrage – concept
-
 Plusieurs des caméras installées dans l’espace d’exposition indiquent les positions des objets et les transfèrent leurs coordonnées algorithmiques, grâce au logiciel de Tracking que nous avons développé à cet usage. Grâce à ces coordonnées, certains objets autonomes peuvent corriger leur position. Ils peuvent ainsi éviter les visiteurs et leur laisser le champ libre.
Plusieurs des caméras installées dans l’espace d’exposition indiquent les positions des objets et les transfèrent leurs coordonnées algorithmiques, grâce au logiciel de Tracking que nous avons développé à cet usage. Grâce à ces coordonnées, certains objets autonomes peuvent corriger leur position. Ils peuvent ainsi éviter les visiteurs et leur laisser le champ libre. - 12 2009
-
Robotique : tracking caméra avec Grey Point et Reactivision – concept
-
 La surface de projection se base sur les robes traditionnelles marocaines, Djellaba, Fokia ou Djabador, que l’on peut encore voir sur la Place Djemaa El Fna de nos jours et qui représentent les « habits de travail » des Halaiqis.
La surface de projection se base sur les robes traditionnelles marocaines, Djellaba, Fokia ou Djabador, que l’on peut encore voir sur la Place Djemaa El Fna de nos jours et qui représentent les « habits de travail » des Halaiqis. - 11 2009
-
Design de l’exposition : surface de projection –concept
-
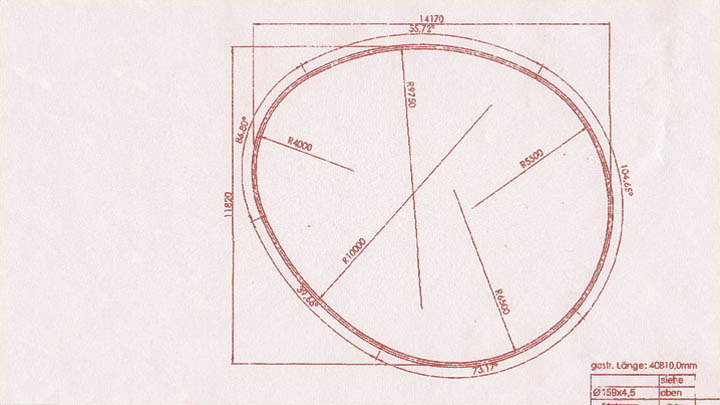 La dynamique de l’installation résulte du mouvement de 130 robots roulants autonomes. Un faux-plafond sera construit dans l’espace d’exposition servant de support.
La dynamique de l’installation résulte du mouvement de 130 robots roulants autonomes. Un faux-plafond sera construit dans l’espace d’exposition servant de support. - 10 2009
-
Design de l’exposition : Halqa en acier – concept