
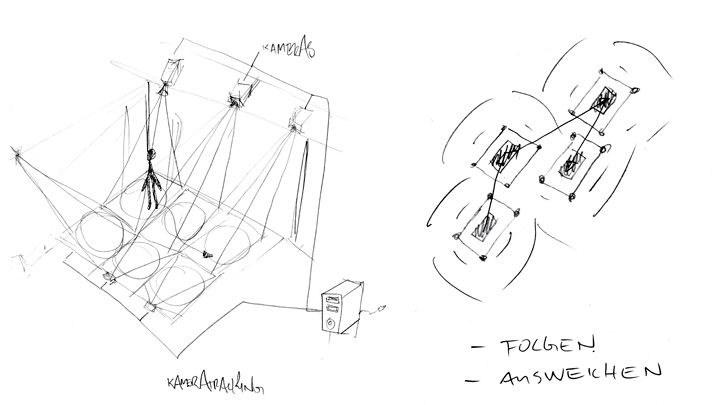
Mehrere auf den Ausstellungsraum gerichtete Kameras liefern mithilfe einer eigens entwickelten Tracking-Software zuverlässig die Positionen aller Objekte im Raum und transformieren diese in algorithmisch verarbeitbare Koordinaten. Aufgrund dieser Koordinaten können sämtliche autonome Objekte ihre Positionen korrigieren. Sie weichen den Besuchern aus, lassen sie passieren und können Wege und Einblicke frei geben.
12 2009
Robotik : Kameratracking mit Point Grey und reacTIVision - Entwurf

