AL HALQA KINETICS zu realisieren ist ein Prozess. Wir erwarten und gestalten technologisches Neuland,
dramaturgische Erfüllung und konservatorisches Material. Wir wollen diesen Prozess in Worten und Bildern
dokumentieren und festhalten. Dies soll hier geschehen:
-
 Wow! Die erste echte virtuell-reelle Halqa heute erlebt, was für ein magischer Moment. Heute ist der 19.06, noch 10 tage zur Eröffnung und 10 Objekte zuverlässig auf der Membran. Hier und da mal eine Kollision, aber mal ehrlich: Das Drängeln gehört ja irgendwie dazu.
Wow! Die erste echte virtuell-reelle Halqa heute erlebt, was für ein magischer Moment. Heute ist der 19.06, noch 10 tage zur Eröffnung und 10 Objekte zuverlässig auf der Membran. Hier und da mal eine Kollision, aber mal ehrlich: Das Drängeln gehört ja irgendwie dazu. - 06 2011
-
Architektur : Etwas wie die erste echte virtuell-reelle Halqa - (Probe)Aufbau


-
 Grandios vier Bots, vier Bahnen; wir erahnen Wirkung im Raum. So ein kleiner Schritt und doch so überwältigend - die Bahnen bewegen sich autonom, einzig ein Ziel ist vorgegeben - wir arbeiten uns langsam hoch morgen sollen es 10 Objekte werden.
Grandios vier Bots, vier Bahnen; wir erahnen Wirkung im Raum. So ein kleiner Schritt und doch so überwältigend - die Bahnen bewegen sich autonom, einzig ein Ziel ist vorgegeben - wir arbeiten uns langsam hoch morgen sollen es 10 Objekte werden. - 06 2011
-
Architektur : Formationsgleitfahren zu Viert - (Probe)Aufbau
-
 Die erste Bahn an einem Roboter. Nocheinmal letzter Schliff an der Magnetkupplung; etwas stärkere Magnete, damit die Bahnen besser halten und halten und halten. Das PTFE gleitet auf dem PTFE wie es soll; wir haben es nicht besser erwartet, aber auch nicht schlechter. Ein alles wird doch noch sehr gut Tag war heute.
Die erste Bahn an einem Roboter. Nocheinmal letzter Schliff an der Magnetkupplung; etwas stärkere Magnete, damit die Bahnen besser halten und halten und halten. Das PTFE gleitet auf dem PTFE wie es soll; wir haben es nicht besser erwartet, aber auch nicht schlechter. Ein alles wird doch noch sehr gut Tag war heute. - 06 2011
-
Architektur : Die erste Bahn an einem Roboter - (Probe)Aufbau
-
 Schliesslich auf der Membran: Die Marker werden verlässlich getrackt; die Gummis der Räder haben ausreichend Grip auf der Membran. Was noch? Nichts für den Moment: Weiter, weiter, weiter, die nächsten Stunden und Tage werden interessant.
Schliesslich auf der Membran: Die Marker werden verlässlich getrackt; die Gummis der Räder haben ausreichend Grip auf der Membran. Was noch? Nichts für den Moment: Weiter, weiter, weiter, die nächsten Stunden und Tage werden interessant. - 06 2011
-
Architektur : Roboter auf der Membran - (Probe)Aufbau
-
 108 Objekte in 6 Kisten - die Roboter kommen in die Hallen. Geladen, programmiert und bereit alles zu tun, was von ihnen verlangt wird. Pustekuchen; nicht wirklich erwachsen die Kameraden und so springen sie stattdessen von Tischen, rennen von Sinnen aufeinander zu und schlagen sich die Köpfe ein.
108 Objekte in 6 Kisten - die Roboter kommen in die Hallen. Geladen, programmiert und bereit alles zu tun, was von ihnen verlangt wird. Pustekuchen; nicht wirklich erwachsen die Kameraden und so springen sie stattdessen von Tischen, rennen von Sinnen aufeinander zu und schlagen sich die Köpfe ein. - 06 2011
-
Robotik : Invasion der Roboter - (Probe)Aufbau
-
 Gregor hackt an der Steuersoftware. Das ist komplex und kompliziert, wird aber nochmal deutlich komplizierter wenn es im Schichtdienst von 22h bi 4h geschieht. Aber wer macht den sowas? Wir machen sowas, denn nur zwischen 22h und 4h ist es in diesen lichtumfluteten Hallen dunkel genug um ein sauberes Kamerabild zu bekommen.
Gregor hackt an der Steuersoftware. Das ist komplex und kompliziert, wird aber nochmal deutlich komplizierter wenn es im Schichtdienst von 22h bi 4h geschieht. Aber wer macht den sowas? Wir machen sowas, denn nur zwischen 22h und 4h ist es in diesen lichtumfluteten Hallen dunkel genug um ein sauberes Kamerabild zu bekommen. - 06 2011
-
Software : Gregor entwickelt - (Probe)Aufbau
-
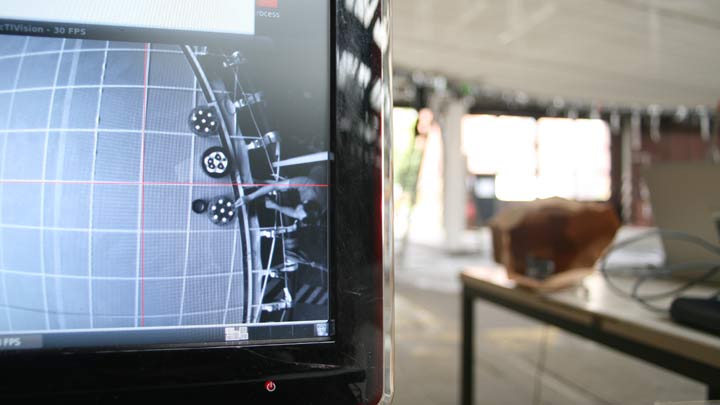 Eine bis zuletzt offene Frage war die Zuverlässigkeit des Tracking der Marker. Nach doch einigen schlaganfallpotenten Momenten, die mit einem Schlag das gesamte Projekt in Frage stellten, scheint jetzt alles mehr und mehr ins Lot zu schwingen. Dennoch steht fest: Das Licht muss absolut einheitlich sein und die Beleuchtung der LEDs muss optimal gestreut werden.
Eine bis zuletzt offene Frage war die Zuverlässigkeit des Tracking der Marker. Nach doch einigen schlaganfallpotenten Momenten, die mit einem Schlag das gesamte Projekt in Frage stellten, scheint jetzt alles mehr und mehr ins Lot zu schwingen. Dennoch steht fest: Das Licht muss absolut einheitlich sein und die Beleuchtung der LEDs muss optimal gestreut werden. - 06 2011
-
Software : Markertracking - (Probe)Aufbau
-
 1 Kilometer Kabel unterschiedlichster Herkunft und unterschiedlichster Bestimmung - die wollen erstmal sorgfältig verlegt werden. Müssen sie auch, denn sonst geht nichts und zwar garnichts mehr. Und was hier so lapidar aussieht, erfüllt bislang ausgesprochen zuverlässig seinen Zweck.
1 Kilometer Kabel unterschiedlichster Herkunft und unterschiedlichster Bestimmung - die wollen erstmal sorgfältig verlegt werden. Müssen sie auch, denn sonst geht nichts und zwar garnichts mehr. Und was hier so lapidar aussieht, erfüllt bislang ausgesprochen zuverlässig seinen Zweck. - 06 2011
-
Architektur : Kabelbaum - (Probe)Aufbau
-
 15 Kameras mit Fish Eyeesquen Weitwinkelobjektiven, suboptimal ausgerichtete Kameraaufhängung und dennoch ein planares Gesamtbild zu erhalten: das ist die Aufgabe. Hierzu spannen wir ein gleichmassiges Raster über die gesamte Distanz des Ringes und richten an diesen, kalibrieren an diesen die 5 * 3 Kamerastränge.
15 Kameras mit Fish Eyeesquen Weitwinkelobjektiven, suboptimal ausgerichtete Kameraaufhängung und dennoch ein planares Gesamtbild zu erhalten: das ist die Aufgabe. Hierzu spannen wir ein gleichmassiges Raster über die gesamte Distanz des Ringes und richten an diesen, kalibrieren an diesen die 5 * 3 Kamerastränge. - 06 2011
-
Architektur : Kalibrierung der Kameras - (Probe)Aufbau
-
 Was für ein Ärger: Der obere Stahlring ist gespiegelt! Macht erstmal garnichts; nicht dem grossen Spannring, nicht der Membran: Lässt sich ja alles ohne grossen Aufwand ebenfalls drehen. Bis auf den Ladering: Diesem müssen um wieder einsatzbereit zu werden 480 Schrauben aus und wieder eingedreht werden; arghs!
Was für ein Ärger: Der obere Stahlring ist gespiegelt! Macht erstmal garnichts; nicht dem grossen Spannring, nicht der Membran: Lässt sich ja alles ohne grossen Aufwand ebenfalls drehen. Bis auf den Ladering: Diesem müssen um wieder einsatzbereit zu werden 480 Schrauben aus und wieder eingedreht werden; arghs! - 06 2011
-
Architektur : Montage Ladering - (Probe)Aufbau
-
 Die Kräfte von in Spitzen 5 KN wir über 40 Meter solides und geprüftes Stahseil, knapp 80 Zurrgurte und Ratschen in die Membran eingebracht. Dieses geschieht in einigen iterativen Schritten um die Membran möglichst gleichmässig zu spannen und auf keinen Fall zu beschädigen. Dies braucht einiges an Geduld, Musse und letzlich auch Oberarmstärke.
Die Kräfte von in Spitzen 5 KN wir über 40 Meter solides und geprüftes Stahseil, knapp 80 Zurrgurte und Ratschen in die Membran eingebracht. Dieses geschieht in einigen iterativen Schritten um die Membran möglichst gleichmässig zu spannen und auf keinen Fall zu beschädigen. Dies braucht einiges an Geduld, Musse und letzlich auch Oberarmstärke. - 06 2011
-
Architektur : Vorspannen der Membran - (Probe)Aufbau
-
 Ein massives schweres Stahlrohr soll die enormen Zugkräfte ableiten, die durch das Vorspannen entstehen werden. Die einzelnen Elemente werden über eine Innenkernverbindung miteinander verschraubt. Der fertig verschraubte verwindungssteife Ring wird über Hubwagen von A nach B nach C geschoben und im Lot genau unter dem korrespondierenden Tragering positioniert.
Ein massives schweres Stahlrohr soll die enormen Zugkräfte ableiten, die durch das Vorspannen entstehen werden. Die einzelnen Elemente werden über eine Innenkernverbindung miteinander verschraubt. Der fertig verschraubte verwindungssteife Ring wird über Hubwagen von A nach B nach C geschoben und im Lot genau unter dem korrespondierenden Tragering positioniert. - 06 2011
-
Architektur : Montage Membranring - (Probe)Aufbau
-
 Ooops, beinahe vergessen: In den beschriebenen Tragering werden die Aluminium Kastenprofile als Aufnahmen für die Kamerawägen eingehängt. Kamerawägen, damit im Falle eines Kameratotalausfalls, die ausgefallene Kamera leger und ohne grössere Schliesszeiten ausgetauscht werden kann.
Ooops, beinahe vergessen: In den beschriebenen Tragering werden die Aluminium Kastenprofile als Aufnahmen für die Kamerawägen eingehängt. Kamerawägen, damit im Falle eines Kameratotalausfalls, die ausgefallene Kamera leger und ohne grössere Schliesszeiten ausgetauscht werden kann. - 06 2011
-
Architektur : Montage Kameraaufnahme - (Probe)Aufbau
-
 Schwer verkürzt geht der Aufbau der gesamten Konstruktion wie folgt ab: Tragering an die Decke bringen; an diesen Druckring mit eingespannter Membran hängen; fertig. Ersterer, ein solider T-Träger Stahlring, wird verschraubt, mittels Kettenzügen unter die Decke gebracht und sorgfältigst fixiert und verzurrt.
Schwer verkürzt geht der Aufbau der gesamten Konstruktion wie folgt ab: Tragering an die Decke bringen; an diesen Druckring mit eingespannter Membran hängen; fertig. Ersterer, ein solider T-Träger Stahlring, wird verschraubt, mittels Kettenzügen unter die Decke gebracht und sorgfältigst fixiert und verzurrt. - 06 2011
-
Architektur : Montage Tragerings - (Probe)Aufbau
-
 Noch einige Kondensatoren und Wiederstände müssen eingelötet werden, aber dann gehts direkt in die vorbereiteten und überaus handliche Tarnsportboxen: Es ist tatschlich geschafft wie es scheint. Die Roboter sind fertig in die Welt auszureiten.
Noch einige Kondensatoren und Wiederstände müssen eingelötet werden, aber dann gehts direkt in die vorbereiteten und überaus handliche Tarnsportboxen: Es ist tatschlich geschafft wie es scheint. Die Roboter sind fertig in die Welt auszureiten. - 06 2011
-
Robotik : Roboter fertig - Produktion
-
 Letzes Handanlegen: Hunderte von Kabeln werden verlegt, Hunderte von Baterien und Motoren angeschlossen. Die Chassis sind endlich bestückt angekommen und in die geparkten Chassis eingefügt. Die Finger schmerzen, die Augen tränen; können kaum glauben, dass es das nun gewesen sein soll.
Letzes Handanlegen: Hunderte von Kabeln werden verlegt, Hunderte von Baterien und Motoren angeschlossen. Die Chassis sind endlich bestückt angekommen und in die geparkten Chassis eingefügt. Die Finger schmerzen, die Augen tränen; können kaum glauben, dass es das nun gewesen sein soll. - 05 2011
-
Robotik : PCBs in Chassis - Produktion
-
 Ein schöner und schicker Versuch das Fliehen und Wehen der Bahnen vorwegzunehmen. Das Höhen und Breiten Verhältniss ist bestätigt wird gut aussehen - die Bahnen selbst sind in Produktion.
Ein schöner und schicker Versuch das Fliehen und Wehen der Bahnen vorwegzunehmen. Das Höhen und Breiten Verhältniss ist bestätigt wird gut aussehen - die Bahnen selbst sind in Produktion. - 05 2011
-
Kommunikation : Neue Kommunikation - Entwurf
-
 20 Amper am Ladegerät generieren einiges an Hitze. Überdimensionierte Kühlbleche führen diese ab; funktioniert bisweilen recht anständig, doch im Zeitalter der Quantifizierung des Stresses wollen wir uns auch nicht lumpen lassen und bringen die Ballastwiederstände zum glühen.
20 Amper am Ladegerät generieren einiges an Hitze. Überdimensionierte Kühlbleche führen diese ab; funktioniert bisweilen recht anständig, doch im Zeitalter der Quantifizierung des Stresses wollen wir uns auch nicht lumpen lassen und bringen die Ballastwiederstände zum glühen. - 05 2011
-
Robotik : Stresstest der Ladegeräte - Produktion
-
 Die Wahrscheinlich letzte unglaublich repetitive Tätigkeit ist getan: Das Schneiden der sensiblen translucenten Folien als Träger der Fiducials.
Die Wahrscheinlich letzte unglaublich repetitive Tätigkeit ist getan: Das Schneiden der sensiblen translucenten Folien als Träger der Fiducials. - 05 2011
-
Robotik : Marker gedruckt und geschnitten - Produktion
-
 Ebenfalls recht transportsicher verpackt sind die 40 Einzelstücke der Ladebahn. Ein glücklicher Nebeneffekt: So sortiert und vormontiert wird der Aufbau um ein vielfaches beschleunigt.
Ebenfalls recht transportsicher verpackt sind die 40 Einzelstücke der Ladebahn. Ein glücklicher Nebeneffekt: So sortiert und vormontiert wird der Aufbau um ein vielfaches beschleunigt. - 05 2011
-
Robotik : Ladebahn gepackt - Produktion
-
 Ein erstes schönes Gefühl das Ergebniss monatelanger entbehrungsreicher Arbeit aufgereit und gut geschützt in den Transportboxen zu sehen - die, im Übrigen das Wiederaufladen während der Lagerung ermöglichen. Hier bleibt nichts dem Zufall überlassen.
Ein erstes schönes Gefühl das Ergebniss monatelanger entbehrungsreicher Arbeit aufgereit und gut geschützt in den Transportboxen zu sehen - die, im Übrigen das Wiederaufladen während der Lagerung ermöglichen. Hier bleibt nichts dem Zufall überlassen. - 05 2011
-
Robotik : Robots gepackt - Produktion
-
 Und auch der Stahl der Aufhängung ist da - zumindest teilweise. Gleichmal hingelgt in die viel zu lange verwaisten Uferhallen und es passt alles. Grosse Erleichterung, präzise geplant und präzise gearbeitet; wenns so weitergeht geht's alles gut!
Und auch der Stahl der Aufhängung ist da - zumindest teilweise. Gleichmal hingelgt in die viel zu lange verwaisten Uferhallen und es passt alles. Grosse Erleichterung, präzise geplant und präzise gearbeitet; wenns so weitergeht geht's alles gut! - 05 2011
-
Architektur : Stahl da - Produktion
-
 Unglaublich aufwendig wurde das Nähen der Membran; nun ist es aber so weit und in einer überschaubar kleinen Box steckt doch ganz grosses Handwerk. Direkt aufs Dach zum Nachbleichen, die Tage sind sommerlich, das muss genutzt werden.
Unglaublich aufwendig wurde das Nähen der Membran; nun ist es aber so weit und in einer überschaubar kleinen Box steckt doch ganz grosses Handwerk. Direkt aufs Dach zum Nachbleichen, die Tage sind sommerlich, das muss genutzt werden. - 05 2011
-
Architektur : Membran da - Produktion
-
 Massive und abrupte konzeptionelle Änderung - günstige Gelegenheit zum Nachdreh. Insgesamt ein Quantensprung in Sachen Sinnlichkeit und Konsistenz der Projektion; sind sehr glücklich mit dem ungewöhnlichen Einstellungen.
Massive und abrupte konzeptionelle Änderung - günstige Gelegenheit zum Nachdreh. Insgesamt ein Quantensprung in Sachen Sinnlichkeit und Konsistenz der Projektion; sind sehr glücklich mit dem ungewöhnlichen Einstellungen. - 05 2011
-
Dramaturgie : Rücken, Rücken, Rücken - Produktion
-
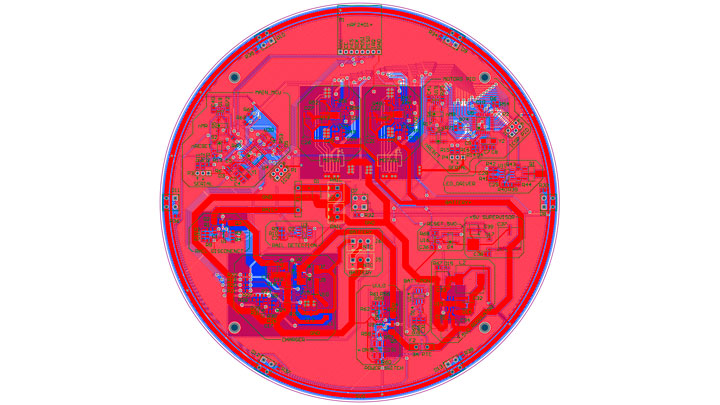 Bislang wenig Wind drum gemacht - dabei ist es sind diese Platinen doch von allergrösster Wichtigkeit! Na, wie auch immer nun sind sie auf dem Weg zum Drucken nach China und sollten schon bald wieder dasein. Die Lohnarbeit wird bemerksenswerterweise in Berlin gemacht - verkehrte Welt.
Bislang wenig Wind drum gemacht - dabei ist es sind diese Platinen doch von allergrösster Wichtigkeit! Na, wie auch immer nun sind sie auf dem Weg zum Drucken nach China und sollten schon bald wieder dasein. Die Lohnarbeit wird bemerksenswerterweise in Berlin gemacht - verkehrte Welt. - 05 2011
-
Robotik : PCB verschickt - Produktion
-
 Die Verträge sind gemacht ab Mai sind wir in den Uferhalle im Wedding. Wunderschöne Omnibushallen am pitoresken Ufer der Panke; Kran zum bewegen von Lokomotiven und grossartige Atmosphere inklusive. Gut den MDF Staub gegen Dieselgeruch zu tauschen.
Die Verträge sind gemacht ab Mai sind wir in den Uferhalle im Wedding. Wunderschöne Omnibushallen am pitoresken Ufer der Panke; Kran zum bewegen von Lokomotiven und grossartige Atmosphere inklusive. Gut den MDF Staub gegen Dieselgeruch zu tauschen. - 04 2011
-
Dramaturgie : Probe in den Uferhallen - Produktion
-
 Und jetzt das noch: die teuer erkauften Qualitätsmotoren weisen grob unterschiedliches Axialspiel und Energiehunger auf - warum? Das gilt es rauszufinden, also 280 Motoren sorgfälltigster Prüfung unterziehen, Drehmomente der Schrauben angleichen, etc. Kein Spass und unnötig!
Und jetzt das noch: die teuer erkauften Qualitätsmotoren weisen grob unterschiedliches Axialspiel und Energiehunger auf - warum? Das gilt es rauszufinden, also 280 Motoren sorgfälltigster Prüfung unterziehen, Drehmomente der Schrauben angleichen, etc. Kein Spass und unnötig! - 04 2011
-
Robotik : Motortuning - Produktion
-
 Die Steck/Schraubverbindung bewährt sich - Fertigstellungszeiten werden immer weiter optimiert und gedrückt. Der Arbeiter leidet an der gewaltigen Monotonie, die Zahlen jedoch stimmen, das Plansoll zur Fertigstellung Ende des Monats erfüllt. Ich denke ich gehe als Consultant nach China um dort Prozesse zu rationalisieren, wenn dies hier vorbei ist : )
Die Steck/Schraubverbindung bewährt sich - Fertigstellungszeiten werden immer weiter optimiert und gedrückt. Der Arbeiter leidet an der gewaltigen Monotonie, die Zahlen jedoch stimmen, das Plansoll zur Fertigstellung Ende des Monats erfüllt. Ich denke ich gehe als Consultant nach China um dort Prozesse zu rationalisieren, wenn dies hier vorbei ist : ) - 04 2011
-
Robotik : Impressionen des Robotersteckens - Produktion
-
 Es geht voran - die Modulbauweise ermöglicht einen einigermassen Fordschen Workflow. Pro Objekt sind für die einfache Montage dennoch 2 Stunden flat zu veranschlagen; es will nicht aufhören.
Es geht voran - die Modulbauweise ermöglicht einen einigermassen Fordschen Workflow. Pro Objekt sind für die einfache Montage dennoch 2 Stunden flat zu veranschlagen; es will nicht aufhören. - 04 2011
-
Robotik : Zum Ganzen - Produktion
-
 Alles aufwändiger und gewaltiger als gedacht. 120 Objekte aus etwa 100 Einzelteilen - exklusive Verschraubung wohlgemerkt -, da kommt einiges Zusammen. Und es muss einiges zusammengebracht werden.
Alles aufwändiger und gewaltiger als gedacht. 120 Objekte aus etwa 100 Einzelteilen - exklusive Verschraubung wohlgemerkt -, da kommt einiges Zusammen. Und es muss einiges zusammengebracht werden. - 04 2011
-
Robotik : Teile, Teile und nochmehr Teile - Produktion
-
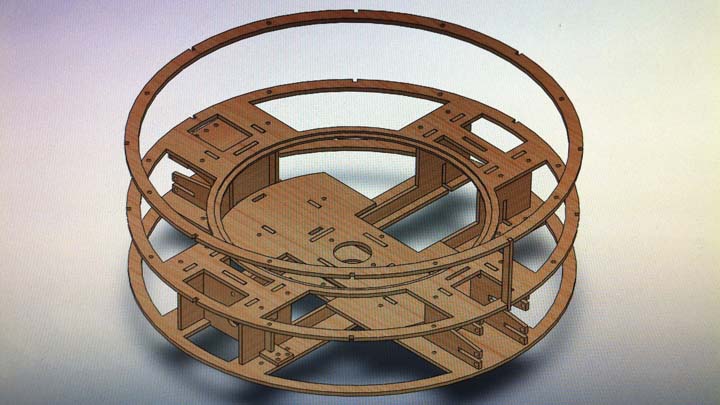 Die Entwicklung in CAD zahlt sich aus - die Generierung des G-Codes für die Produktion aus MDF/HDF braucht einige Revisionen ist dann aber dennoch bald vollbracht. Die Produktion beginnt und soll uns etwa einen vollen Monat beschäftigen - nicht wirklich eingeplant, aber ebensowenig vermeidbar.
Die Entwicklung in CAD zahlt sich aus - die Generierung des G-Codes für die Produktion aus MDF/HDF braucht einige Revisionen ist dann aber dennoch bald vollbracht. Die Produktion beginnt und soll uns etwa einen vollen Monat beschäftigen - nicht wirklich eingeplant, aber ebensowenig vermeidbar. - 03 2011
-
Robotik : Vom Design zur Produktion - Entwurf
-
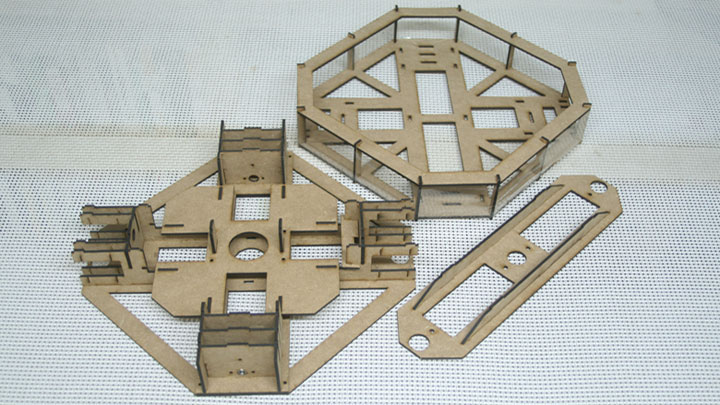
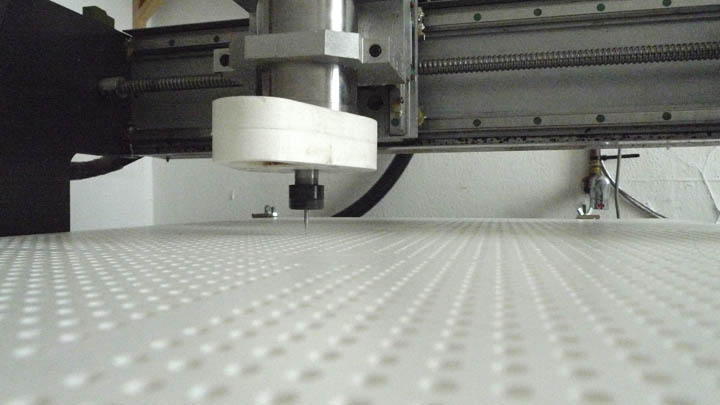 Die Chassis der Fahrroboter erweist sich als deutlich aufwändiger als erwartet - insbesonders kostengünstig können diese nicht produziert werden. Machen wir es "in-house" und entwickeln einen die Situation entscheidend verbessernden Vakuumtisch für die CNC Fräse.
Die Chassis der Fahrroboter erweist sich als deutlich aufwändiger als erwartet - insbesonders kostengünstig können diese nicht produziert werden. Machen wir es "in-house" und entwickeln einen die Situation entscheidend verbessernden Vakuumtisch für die CNC Fräse. - 03 2011
-
Robotik : Auf dem Weg zur Zerspanung - Produktion
-
 Bei der Menge an Objekten gilt es die Aufbauzeiten der jewiligen Module im strengsten Fordschen Sinne zu optimieren. Das blosse Stecken und verschrauben der Chassis erfordert zum gegenwärtigen Zeitpunkt etwa 30 Minuten - das muss noch deutlich schneller gehen.
Bei der Menge an Objekten gilt es die Aufbauzeiten der jewiligen Module im strengsten Fordschen Sinne zu optimieren. Das blosse Stecken und verschrauben der Chassis erfordert zum gegenwärtigen Zeitpunkt etwa 30 Minuten - das muss noch deutlich schneller gehen. - 03 2011
-
Robotik : Aufbautest Roboterchassis - Entwurf
-
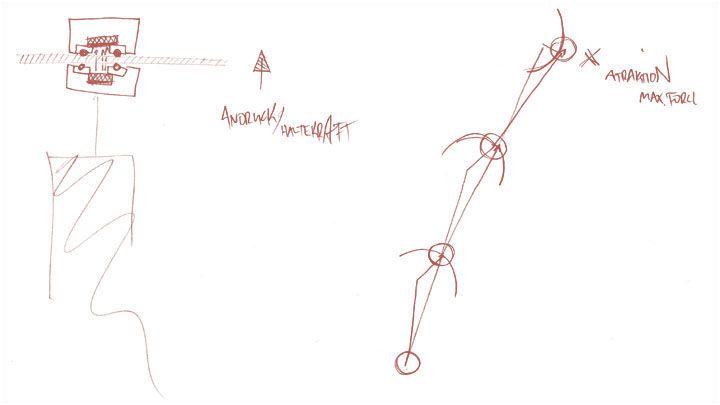
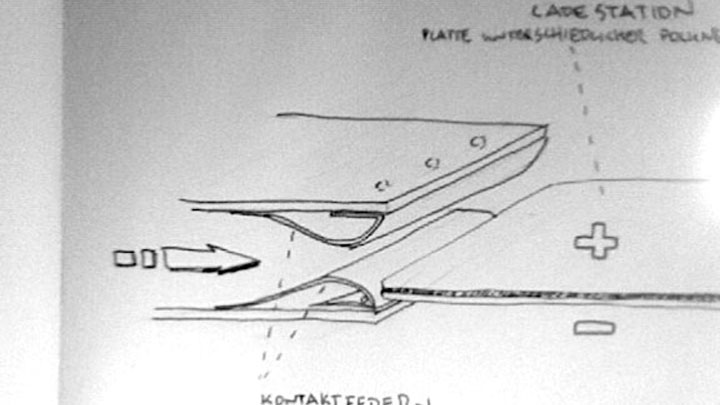 Der Lademechanismus der Roboter bereitete uns lange Zeit einiges an Kopfzerbrechen. Insbesonders die Flexibilität und das hieraus resultierende Spiel schien sehr bedeutend, das Ergebniss dieses Entwurfprozesses funktioniert verlässlich.
Der Lademechanismus der Roboter bereitete uns lange Zeit einiges an Kopfzerbrechen. Insbesonders die Flexibilität und das hieraus resultierende Spiel schien sehr bedeutend, das Ergebniss dieses Entwurfprozesses funktioniert verlässlich. - 02 2011
-
Robotik : Lademechanismus - Entwurf
-
 Die Zeit drängt - also Zeit nägel mit Köpfen zu machen. Alle 15 Kameras sind gekommen, laufen und laufen und laufen. Die verarbeitende Rechnereinheit ist erstaunlich wenig ausgelastet, somit sind wir guten Mutes ein stabiles System zu entwickeln.
Die Zeit drängt - also Zeit nägel mit Köpfen zu machen. Alle 15 Kameras sind gekommen, laufen und laufen und laufen. Die verarbeitende Rechnereinheit ist erstaunlich wenig ausgelastet, somit sind wir guten Mutes ein stabiles System zu entwickeln. - 01 2011
-
Software : Kameragridtestrig - Entwurf
-
 Grossartig diese Laser von Sick; präzise, gut dokumentiert - so wie es sein soll. Erste Tests sagen: Ja, die Geräte sollten doch zuverlässig das tun was wir von Ihnen wollen.
Grossartig diese Laser von Sick; präzise, gut dokumentiert - so wie es sein soll. Erste Tests sagen: Ja, die Geräte sollten doch zuverlässig das tun was wir von Ihnen wollen. - 12 2010
-
Software : Lasertest - Entwurf
-
 Nicht sonderlich erfreulicher Umstand, aber ein umso erfreulicheres Ergebniss: Die Kamerasauflösung erwies sich als zu niedrig - also musste nochmals an dem Fiducialset gefeilt werden. Die Rotationsbestimmung litt etwas - aber robust ist es geworden.
Nicht sonderlich erfreulicher Umstand, aber ein umso erfreulicheres Ergebniss: Die Kamerasauflösung erwies sich als zu niedrig - also musste nochmals an dem Fiducialset gefeilt werden. Die Rotationsbestimmung litt etwas - aber robust ist es geworden. - 11 2010
-
Software : Noch effektivere Fiducials - Entwurf
-
 Endlich online die Website - ist auch einiges aufzubereiten gewesen. Jetzt steht sie und hat eine Form, die den Entstehungsprozess von Al Halqa Kinetics weiter begleiten und dokumentieren kann. Genau an dieser Stelle werden wir in regelmäßigen Abständen über Fortschritte berichten.
Endlich online die Website - ist auch einiges aufzubereiten gewesen. Jetzt steht sie und hat eine Form, die den Entstehungsprozess von Al Halqa Kinetics weiter begleiten und dokumentieren kann. Genau an dieser Stelle werden wir in regelmäßigen Abständen über Fortschritte berichten. - 09 2010
-
Software : Der modulare Prozess - Dokumentation
-
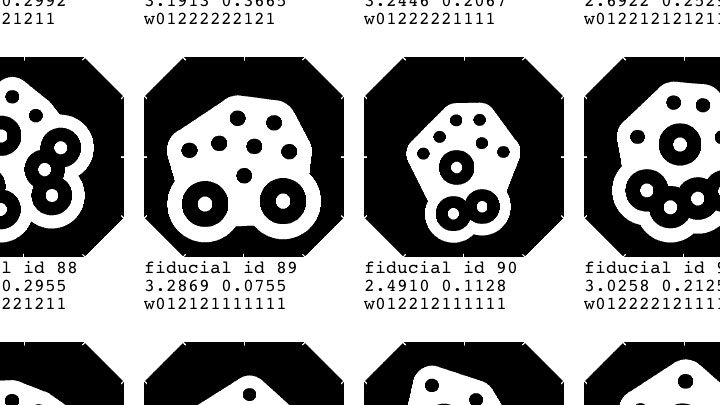 Manchmal sind es die kleinen Probleme die zu großen Lösungen führen: Unser kleines Problem war, dass alle 'auf dem Markt' befindlichen Fiducialsets recht große Marker setzen - für uns ist aber eine deutliche kleinere Bauform obligatorisch. Was also tun? Schreiben wir ein eigenes Set! Gregor hat sich gleich rangemacht und ein Set geschaffen, das in Sachen Stabilität und benötigte Auflösung bahnbrechend ist.
Manchmal sind es die kleinen Probleme die zu großen Lösungen führen: Unser kleines Problem war, dass alle 'auf dem Markt' befindlichen Fiducialsets recht große Marker setzen - für uns ist aber eine deutliche kleinere Bauform obligatorisch. Was also tun? Schreiben wir ein eigenes Set! Gregor hat sich gleich rangemacht und ein Set geschaffen, das in Sachen Stabilität und benötigte Auflösung bahnbrechend ist. - 09 2010
-
Software : Das Al Halqa Kinetics fiducial marker set - Entwurf
-
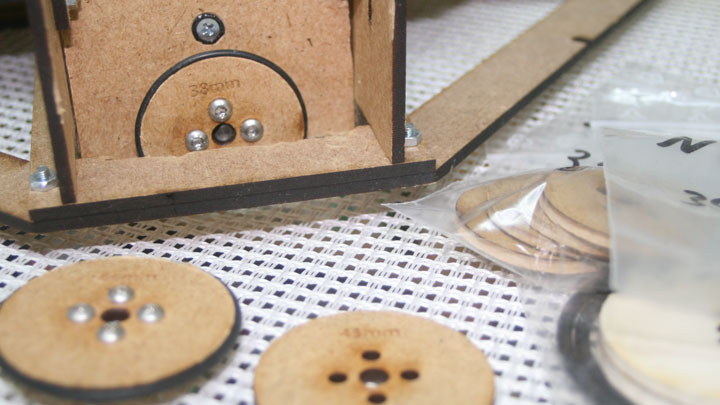 Da uns pro Fahrroboter nur begrenzte Kapazitäten in der Stromversorgung zur Verfügung stehen müssen wir - absolut zeitgemäß - überall extrem 'energiehaushalten'. Die Größe der Räder spielt hier aufgrund des Anfangsdrehmoments beim Anfahren eine enorme Rolle - hätten wir nicht so erwartet. Da die Endgeschwindigkeit irrelevant ist heißt es: Kleine Reifen und tiefer legen!
Da uns pro Fahrroboter nur begrenzte Kapazitäten in der Stromversorgung zur Verfügung stehen müssen wir - absolut zeitgemäß - überall extrem 'energiehaushalten'. Die Größe der Räder spielt hier aufgrund des Anfangsdrehmoments beim Anfahren eine enorme Rolle - hätten wir nicht so erwartet. Da die Endgeschwindigkeit irrelevant ist heißt es: Kleine Reifen und tiefer legen! - 08 2010
-
Robotik : Radurchmesser - Entwurf
-
 Lange Versuche mit Infrarotbeleuchtung der Objekte führten zu wenig Ergebnissen. Die Schwierigkeit ist es eine Fläche von 150 Qm gleichmäßig und einheitlich auszuleuchten. So gleichmäßig, dass die Kamera zuverlässig besagte Marker erkennen und der Rechner diese in Koordinaten übersetzen kann. Kaum möglich, was lag dann näher die Marker selbst mit ultra-low-power LEDs zu illuminieren.
Lange Versuche mit Infrarotbeleuchtung der Objekte führten zu wenig Ergebnissen. Die Schwierigkeit ist es eine Fläche von 150 Qm gleichmäßig und einheitlich auszuleuchten. So gleichmäßig, dass die Kamera zuverlässig besagte Marker erkennen und der Rechner diese in Koordinaten übersetzen kann. Kaum möglich, was lag dann näher die Marker selbst mit ultra-low-power LEDs zu illuminieren. - 08 2010
-
Robotik : Selbstleuchtende Marker - Entwurf
-
 Projektionstest durch Stoffkegel. Interessante Pseudo-Holografische Effekte die dabei Auftreten - beinahe verselbständigt sich das Bild.
Projektionstest durch Stoffkegel. Interessante Pseudo-Holografische Effekte die dabei Auftreten - beinahe verselbständigt sich das Bild. - 07 2010
-
Dramaturgie : Projektionstest durch Stoffkegel - Entwurf
-
 Abderahim Al Maqori - genannt "Al-Azaliah" nach der gleichnamigen Epengeschichte - zählt vermutlich zu den angesehensten Erzählern des Platzes. Schon als kleiner Junge begann er Geschichten vorzutragen. Er lernte bei Al-Hussein, einem der großen Meister Marokkos und seiner Grossmutter, einer Berberin aus Ourika. Sein Ausbildungsweg führte ihn in die Schwefelmienen, wo er die Arbeiter nach Feierabend...
Abderahim Al Maqori - genannt "Al-Azaliah" nach der gleichnamigen Epengeschichte - zählt vermutlich zu den angesehensten Erzählern des Platzes. Schon als kleiner Junge begann er Geschichten vorzutragen. Er lernte bei Al-Hussein, einem der großen Meister Marokkos und seiner Grossmutter, einer Berberin aus Ourika. Sein Ausbildungsweg führte ihn in die Schwefelmienen, wo er die Arbeiter nach Feierabend... - 06 2010
- Dramaturgie : die Geschichtenerzähler - fotografische Skizzen
-
 Fast alle Verkäufer traditioneller Medizin kommen aus dem kleinen Ort Tata im Süden Marokkos, ganz in der Nähe der algerischen Grenze. In der kleinen Wüstenoase herrschen die klimatisch optimalen Bedingungen für die Heilpflanzen, aus denen die „Saharaoui“ ihre Arznei herstellen. Ihr medizinisches Wissen wird seit Generationen innerhalb der Familie weitergegeben. Sie reisen an die verschiedenen Orte Marokkos...
Fast alle Verkäufer traditioneller Medizin kommen aus dem kleinen Ort Tata im Süden Marokkos, ganz in der Nähe der algerischen Grenze. In der kleinen Wüstenoase herrschen die klimatisch optimalen Bedingungen für die Heilpflanzen, aus denen die „Saharaoui“ ihre Arznei herstellen. Ihr medizinisches Wissen wird seit Generationen innerhalb der Familie weitergegeben. Sie reisen an die verschiedenen Orte Marokkos... - 06 2010
-
Dramaturgie : Die Kräuterverkäufer - fotografische Skizzen
-
 Die Aissawa sind eine religiöse Bruderschaft, die sich auf den Sufi-Heiligen Sidi Ben Aissa bezieht, dessen Marabout in Meknès steht. Die Schlange spielt für sie eine zentrale Rolle. Ihre Schlangen kommen meist aus dem südlichen Marokko. Um sie zu fangen, bereiten sie sich tagelang vor und verfolgen ihre Spuren im Sand. Oft sind die tagelang unterwegs, bis ihre Suche erfolgreich ist.
Die Aissawa sind eine religiöse Bruderschaft, die sich auf den Sufi-Heiligen Sidi Ben Aissa bezieht, dessen Marabout in Meknès steht. Die Schlange spielt für sie eine zentrale Rolle. Ihre Schlangen kommen meist aus dem südlichen Marokko. Um sie zu fangen, bereiten sie sich tagelang vor und verfolgen ihre Spuren im Sand. Oft sind die tagelang unterwegs, bis ihre Suche erfolgreich ist. - 06 2010
-
Dramaturgie : Trance und Tanz - fotografische Skizzen
-
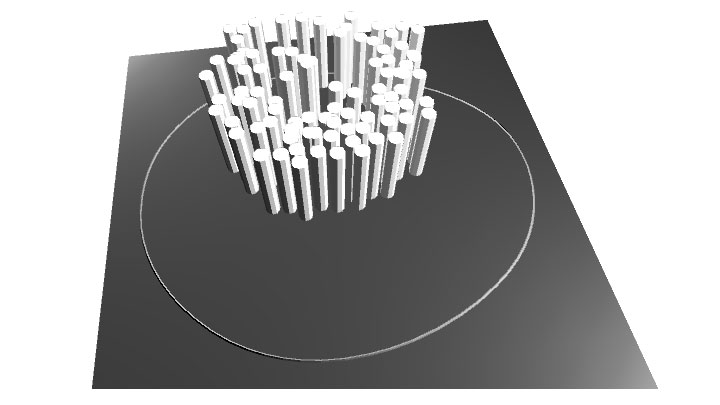 Der erste Schritt in Richtung algorithmische Steuerung der Objekte ist eine algorithmische Simulation der Objekte. Noch ohne 'collision detection', Schwarmverhalten. Die Grenzen kennen die Objekte jedoch bereits und in 3d sind sie auch!
Der erste Schritt in Richtung algorithmische Steuerung der Objekte ist eine algorithmische Simulation der Objekte. Noch ohne 'collision detection', Schwarmverhalten. Die Grenzen kennen die Objekte jedoch bereits und in 3d sind sie auch! - 06 2010
-
Software : Dichte und Nähe im Raum - Simulation
-
 Nasiri Dersi hat die Fähigkeit, in die Zukunft seines Gegenübers zu blicken. Gegen einen kleinen Obolus gibt er sein Wissen weiter. In Begleitung seines Falken kommt er täglich bei Einbruch der Dämmerung auf den Djemaa El Fna, um seine Halqa zu versammeln.
Nasiri Dersi hat die Fähigkeit, in die Zukunft seines Gegenübers zu blicken. Gegen einen kleinen Obolus gibt er sein Wissen weiter. In Begleitung seines Falken kommt er täglich bei Einbruch der Dämmerung auf den Djemaa El Fna, um seine Halqa zu versammeln. - 05 2010
-
Dramaturgie : Magier, Zauberer und Wahrsager - fotografische Skizzen
-
 Die Entwicklung des Chassis wird uns noch einige Zeit beschäftigen. Kupplungsaufnahme, Radaufhängung und nicht zuletzt der Lademechanismus sind Komponenten die hinsichtlich Dauerbetrieb und Wartungsfreundlichkeit doch recht durchdacht gestaltet werden sollten.
Die Entwicklung des Chassis wird uns noch einige Zeit beschäftigen. Kupplungsaufnahme, Radaufhängung und nicht zuletzt der Lademechanismus sind Komponenten die hinsichtlich Dauerbetrieb und Wartungsfreundlichkeit doch recht durchdacht gestaltet werden sollten. - 05 2010
-
Robotik : Revision des Chassis - Entwurf
-
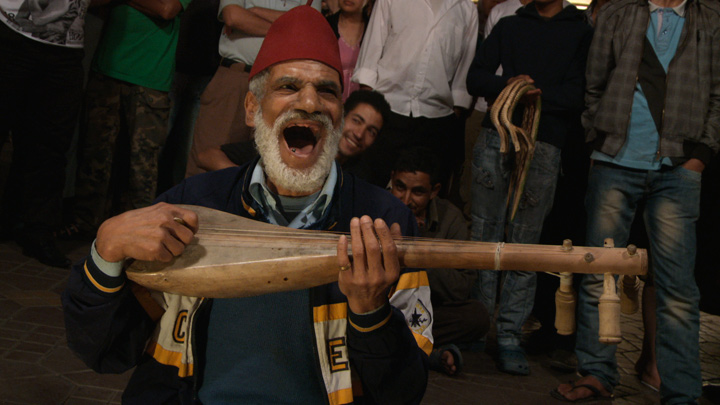 Timseh – „das Krokodil“ - Auf dem Platz nennt man ihn den „marokkanischen Bob Marley“. Verpackt in schönen Gesängen beschimpft er humorvoll sein Publikum. Eines seiner Kunststücke besteht darin, Zigaretten verschwinden zu lassen.
Timseh – „das Krokodil“ - Auf dem Platz nennt man ihn den „marokkanischen Bob Marley“. Verpackt in schönen Gesängen beschimpft er humorvoll sein Publikum. Eines seiner Kunststücke besteht darin, Zigaretten verschwinden zu lassen. - 05 2010
-
Dramaturgie : Komödie - fotografische Skizzen
-
 Die Ulad Hamad ua Mouss, die Akrobaten des Djemaa El Fna sind meist Waisenkinder, die vom Leiter der Gruppe mit auf Reisen durch Marokko genommen werden und dabei ihre akrobatischen Fähigkeiten ausbilden. Um die Baraka, den Segen für ihr Handwerk zu erhalten, unternehmen sie die obligatorische Reise zur Begräbnisstätte ihres Urvaters Sidi Hamad ua Mouss. Seine Baraka soll sie...
Die Ulad Hamad ua Mouss, die Akrobaten des Djemaa El Fna sind meist Waisenkinder, die vom Leiter der Gruppe mit auf Reisen durch Marokko genommen werden und dabei ihre akrobatischen Fähigkeiten ausbilden. Um die Baraka, den Segen für ihr Handwerk zu erhalten, unternehmen sie die obligatorische Reise zur Begräbnisstätte ihres Urvaters Sidi Hamad ua Mouss. Seine Baraka soll sie... - 05 2010
-
Dramaturgie : Feuer und Akrobatik - fotografische Skizzen
-
 Der erste Prototyp steht: die sorgfältigst gewählten Motoren bringen eine hervorragende Performance, die Aufhängung ist erstaunlich solide, lediglich das Chassis der Fahrroboter braucht noch die ein oder andere Revision. Die französischen Getriebemotoren sollen im Übrigen aus marokkanischer Produktion stammen - kaum zu glauben!
Der erste Prototyp steht: die sorgfältigst gewählten Motoren bringen eine hervorragende Performance, die Aufhängung ist erstaunlich solide, lediglich das Chassis der Fahrroboter braucht noch die ein oder andere Revision. Die französischen Getriebemotoren sollen im Übrigen aus marokkanischer Produktion stammen - kaum zu glauben! - 04 2010
-
Robotik : Der erste Prototyp - Entwurf
-
 Die Gaze, die leere Hülle als Metapher des Verlusts sind melancholische Objekte. Wie soll die Bewegung dieser - der Objekte an sich - aussehen? Wo in diesem Wehen oder Schleppen ist der Übergang von Würde zu Hysterie? Auch hier sollen Simulationen helfen.
Die Gaze, die leere Hülle als Metapher des Verlusts sind melancholische Objekte. Wie soll die Bewegung dieser - der Objekte an sich - aussehen? Wo in diesem Wehen oder Schleppen ist der Übergang von Würde zu Hysterie? Auch hier sollen Simulationen helfen. - 04 2010
-
Architektur : Das Wehen der Gaze - Simulation
-
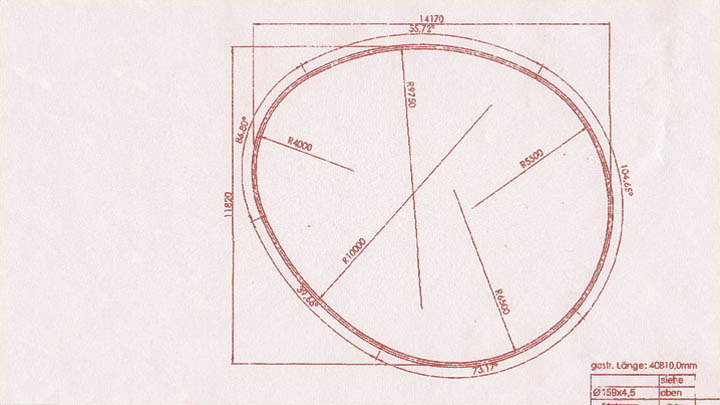
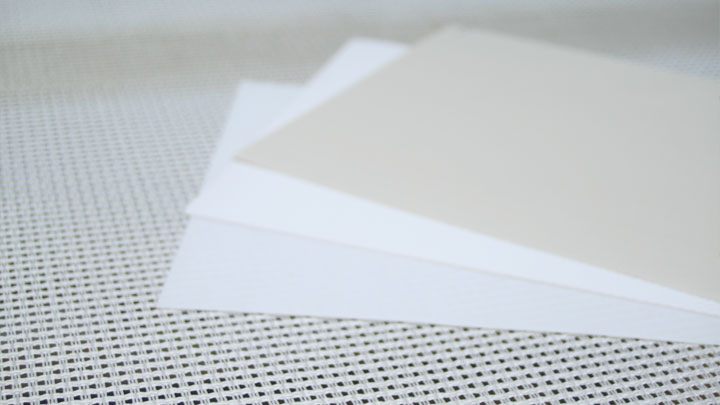 Wie also eine etwa 120 Qm große Fläche frei schwebend realisieren? Plattenverbundwerkstoffe stoßen hier schnell an ihre Grenzen. Mangelnde Genauigkeit der Anschlussstöße, enormes Gewicht und die Unmöglichkeit des Transports ließ uns diesen Ansatz früh verwerfen. Die Lösung hieß schon sehr bald: PTFE Membran!
Wie also eine etwa 120 Qm große Fläche frei schwebend realisieren? Plattenverbundwerkstoffe stoßen hier schnell an ihre Grenzen. Mangelnde Genauigkeit der Anschlussstöße, enormes Gewicht und die Unmöglichkeit des Transports ließ uns diesen Ansatz früh verwerfen. Die Lösung hieß schon sehr bald: PTFE Membran! - 03 2010
-
Architektur : membranes Tragwerk - Entwurf
-
 Wie wird die Choreographie der Objekte den Raum bestimmen? Wie viele Objekte gestalten den Raum, wie viele sättigen ihn? Mit welcher Geschwindigkeit müssen sie sich fortbewegen? Fragen die als statische Skizzen nur schwer geklärt werden können - daher hierzu hier und im Folgenden einige Simulationen.
Wie wird die Choreographie der Objekte den Raum bestimmen? Wie viele Objekte gestalten den Raum, wie viele sättigen ihn? Mit welcher Geschwindigkeit müssen sie sich fortbewegen? Fragen die als statische Skizzen nur schwer geklärt werden können - daher hierzu hier und im Folgenden einige Simulationen. - 03 2010
-
Robotik : Verhaltensstudien - Simulation
-
 Jede einzelne der nahezu einhundert Projektionsflächen ist über eine spezielle Haltevorrichtung mit einem Vehikel verbunden, welches sich völlig eigenständig - einer Choreographie folgend - auf dem Zwischenboden bewegen kann. Wie? Das ist ein streng gehütetes Geheimnis und sicherlich Teil der Magie der Installation.
Jede einzelne der nahezu einhundert Projektionsflächen ist über eine spezielle Haltevorrichtung mit einem Vehikel verbunden, welches sich völlig eigenständig - einer Choreographie folgend - auf dem Zwischenboden bewegen kann. Wie? Das ist ein streng gehütetes Geheimnis und sicherlich Teil der Magie der Installation. - 01 2010
-
Architektur : Autonome Projektionsflächen und Haltevorrichtungen - Entwurf
-
 Mehrere auf den Ausstellungsraum gerichtete Kameras liefern mithilfe einer eigens entwickelten Tracking-Software zuverlässig die Positionen aller Objekte im Raum und transformieren diese in algorithmisch verarbeitbare Koordinaten. Aufgrund dieser Koordinaten können sämtliche autonome Objekte ihre Positionen korrigieren. Sie weichen den Besuchern aus, lassen sie passieren und können Wege und Einblicke frei geben.
Mehrere auf den Ausstellungsraum gerichtete Kameras liefern mithilfe einer eigens entwickelten Tracking-Software zuverlässig die Positionen aller Objekte im Raum und transformieren diese in algorithmisch verarbeitbare Koordinaten. Aufgrund dieser Koordinaten können sämtliche autonome Objekte ihre Positionen korrigieren. Sie weichen den Besuchern aus, lassen sie passieren und können Wege und Einblicke frei geben. - 12 2009
-
Robotik : Kameratracking mit Point Grey und reacTIVision - Entwurf
-
 Die Gestaltungsvorlage für die Projektionsflächen bilden die traditionellen marokkanischen Gewänder, die Djellaba, Fokia oder Djabador, die auch heute noch teilweise auf dem Djemaa El Fna zu sehen sind und die "Berufskleidung" der Halaiqi darstellen.
Die Gestaltungsvorlage für die Projektionsflächen bilden die traditionellen marokkanischen Gewänder, die Djellaba, Fokia oder Djabador, die auch heute noch teilweise auf dem Djemaa El Fna zu sehen sind und die "Berufskleidung" der Halaiqi darstellen. - 11 2009
-
Architektur : Projektionsflächen - Entwurf
-
 Die Dynamik der Installation wird gewährleistet durch 130 sich autonom bewegender Fahrroboter. Als tragende Konstruktion für diese, und damit der sich im Raum bewegenden Projektionsflächen, wird im Ausstellungsraum eine Zwischendecke eingezogen.
Die Dynamik der Installation wird gewährleistet durch 130 sich autonom bewegender Fahrroboter. Als tragende Konstruktion für diese, und damit der sich im Raum bewegenden Projektionsflächen, wird im Ausstellungsraum eine Zwischendecke eingezogen. - 10 2009
-
Architektur : Halqa aus Stahl - Skizze